
Gruebler's Theorem Rule Kinematics Calculator

The Gruebler's Theorem Rule Kinematics Calculator is a crucial tool in the field of mechanical engineering, designed to determine the degree of freedom of a kinematic chain. This theorem, developed by Martin Gruebler, provides a mathematical approach to analyze the mobility of mechanical systems. By using the Gruebler's Theorem Rule Kinematics Calculator, engineers can efficiently calculate the degrees of freedom, making it an essential asset in the design and development of complex mechanical systems, mechanisms, and robots, allowing for more accurate and efficient analysis of their kinematic behavior and performance. It simplifies complex calculations.
- Understanding Gruebler's Theorem Rule Kinematics Calculator
- How can you calculate the degrees of freedom of a kinematic mechanism?
- What is the equation for Grubler's criterion for plane mechanisms with constrained motion?
-
Frequently Asked Questions (FAQs)
- What is Gruebler's Theorem and how does it apply to kinematics calculations?
- How does the Gruebler's Theorem Rule Kinematics Calculator work?
- What are the benefits of using the Gruebler's Theorem Rule Kinematics Calculator?
- What are the limitations of the Gruebler's Theorem Rule Kinematics Calculator?
Understanding Gruebler's Theorem Rule Kinematics Calculator
Gruebler's Theorem Rule Kinematics Calculator is a mathematical tool used to calculate the degrees of freedom of a mechanical system. This theorem is fundamental in the field of kinematics, which deals with the study of the motion of objects without considering the forces that cause the motion. The Gruebler's Theorem Rule Kinematics Calculator is essential in designing and analyzing mechanical systems, such as robotic arms, gears, and linkages. It helps engineers to determine the number of degrees of freedom required for a mechanical system to perform a specific task.
Introduction to Gruebler's Theorem
Gruebler's Theorem is a mathematical formula used to calculate the degrees of freedom of a mechanical system. The theorem states that the number of degrees of freedom of a mechanical system is equal to the number of joints minus the number of constraints. The formula is given by: F = 6(n-1) - 5j - 4h - 3s - 2p - c, where F is the number of degrees of freedom, n is the number of links, j is the number of revolute joints, h is the number of spherical joints, s is the number of helical joints, p is the number of prismatic joints, and c is the number of constraints.
Benefits of Using Gruebler's Theorem Rule Kinematics Calculator
The Gruebler's Theorem Rule Kinematics Calculator has several benefits, including:
Simplified design process: The calculator helps engineers to determine the number of degrees of freedom required for a mechanical system, making the design process more efficient.
Improved accuracy: The calculator provides accurate results, reducing the risk of errors in the design process.
Increased productivity: The calculator saves time and effort, allowing engineers to focus on other aspects of the design process.
Applications of Gruebler's Theorem Rule Kinematics Calculator
The Gruebler's Theorem Rule Kinematics Calculator has a wide range of applications, including:
Robotics: The calculator is used to design and analyze robotic arms and other mechanical systems.
Mechanical engineering: The calculator is used to design and analyze gears, linkages, and other mechanical systems.
Aerospace engineering: The calculator is used to design and analyze aircraft and spacecraft systems.
Limitations of Gruebler's Theorem Rule Kinematics Calculator
The Gruebler's Theorem Rule Kinematics Calculator has some limitations, including:
Assumes ideal joints: The calculator assumes that the joints are ideal, which may not be the case in real-world applications.
Does not account for friction: The calculator does not account for friction, which can affect the motion of the mechanical system.
Limited to planar systems: The calculator is limited to planar systems, and may not be applicable to spatial systems.
Future Developments of Gruebler's Theorem Rule Kinematics Calculator
The Gruebler's Theorem Rule Kinematics Calculator is continuously being developed and improved. Future developments may include:
Incorporating friction and other non-ideal joint effects: This would make the calculator more accurate and applicable to real-world applications.
Extending to spatial systems: This would allow the calculator to be used for more complex mechanical systems.
Integrating with other design tools: This would make the calculator more useful and efficient for engineers.
| Calculator Input | Calculator Output |
|---|---|
| Number of links | Number of degrees of freedom |
| Number of joints | Number of constraints |
| Type of joints | Type of mechanical system |
How can you calculate the degrees of freedom of a kinematic mechanism?

To calculate the degrees of freedom of a kinematic mechanism, you need to understand the concept of mobility and how it relates to the constraints imposed by the joints and links that make up the mechanism. The Grübler-Kutzbach criterion is a widely used method for calculating the degrees of freedom of a planar mechanism, which is a mechanism that moves in a two-dimensional space. This criterion takes into account the number of links, joints, and degrees of freedom of each joint to determine the overall mobility of the mechanism.
Understanding the Concept of Degrees of Freedom
The degrees of freedom of a kinematic mechanism refer to the number of independent parameters that define the configuration of the mechanism. In other words, it is the number of variables that need to be specified in order to determine the position and orientation of all the links in the mechanism. To calculate the degrees of freedom, you need to consider the type of joints used in the mechanism, such as revolute, prismatic, or spherical joints, and how they constrain the motion of the links. For example:
- The Grübler-Kutzbach criterion is a mathematical formula that calculates the degrees of freedom based on the number of links, joints, and degrees of freedom of each joint.
- The type of joints used in the mechanism, such as revolute, prismatic, or spherical joints, can affect the degrees of freedom of the mechanism.
- The configuration of the mechanism, including the position and orientation of all the links, must be considered when calculating the degrees of freedom.
Applying the Grübler-Kutzbach Criterion
The Grübler-Kutzbach criterion is a widely used method for calculating the degrees of freedom of a planar mechanism. This criterion is based on the idea that the mobility of a mechanism is determined by the number of links, joints, and degrees of freedom of each joint. The formula for the Grübler-Kutzbach criterion is: DOF = 3(n-1) - 2j - h, where DOF is the number of degrees of freedom, n is the number of links, j is the number of joints, and h is the number of higher-pair constraints. For example:
- The number of links in the mechanism, including the ground link, must be considered when applying the Grübler-Kutzbach criterion.
- The type of joints used in the mechanism, such as revolute, prismatic, or spherical joints, can affect the number of joints and higher-pair constraints.
- The configuration of the mechanism, including the position and orientation of all the links, must be considered when applying the Grübler-Kutzbach criterion.
Considering the Type of Joints
The type of joints used in a kinematic mechanism can affect the degrees of freedom of the mechanism. For example, a revolute joint allows for rotational motion, while a prismatic joint allows for translational motion. The degrees of freedom of each joint must be considered when calculating the overall mobility of the mechanism. For example:
- A revolute joint has one degree of freedom, which is the rotational motion about the axis of rotation.
- A prismatic joint has one degree of freedom, which is the translational motion along the axis of translation.
Accounting for Constraints
The constraints imposed by the joints and links in a kinematic mechanism can affect the degrees of freedom of the mechanism. For example, a link that is constrained to move only in a plane has fewer degrees of freedom than a link that can move in three-dimensional space. The constraints must be considered when calculating the overall mobility of the mechanism. For example:
- A link that is constrained to move only in a plane has two degrees of freedom, which are the x and y coordinates of the link.
- A link that can move in three-dimensional space has three degrees of freedom, which are the x, y, and z coordinates of the link.
Calculating the Mobility of a Mechanism
The mobility of a kinematic mechanism can be calculated using the Grübler-Kutzbach criterion. This involves counting the number of links, joints, and degrees of freedom of each joint, and then applying the formula to determine the overall mobility of the mechanism. For example:
- The number of links in the mechanism, including the ground link, must be considered when calculating the mobility.
- The type of joints used in the mechanism, such as revolute, prismatic, or spherical joints, can affect the number of joints and degrees of freedom.
- The configuration of the mechanism, including the position and orientation of all the links, must be considered when calculating the mobility.
What is the equation for Grubler's criterion for plane mechanisms with constrained motion?
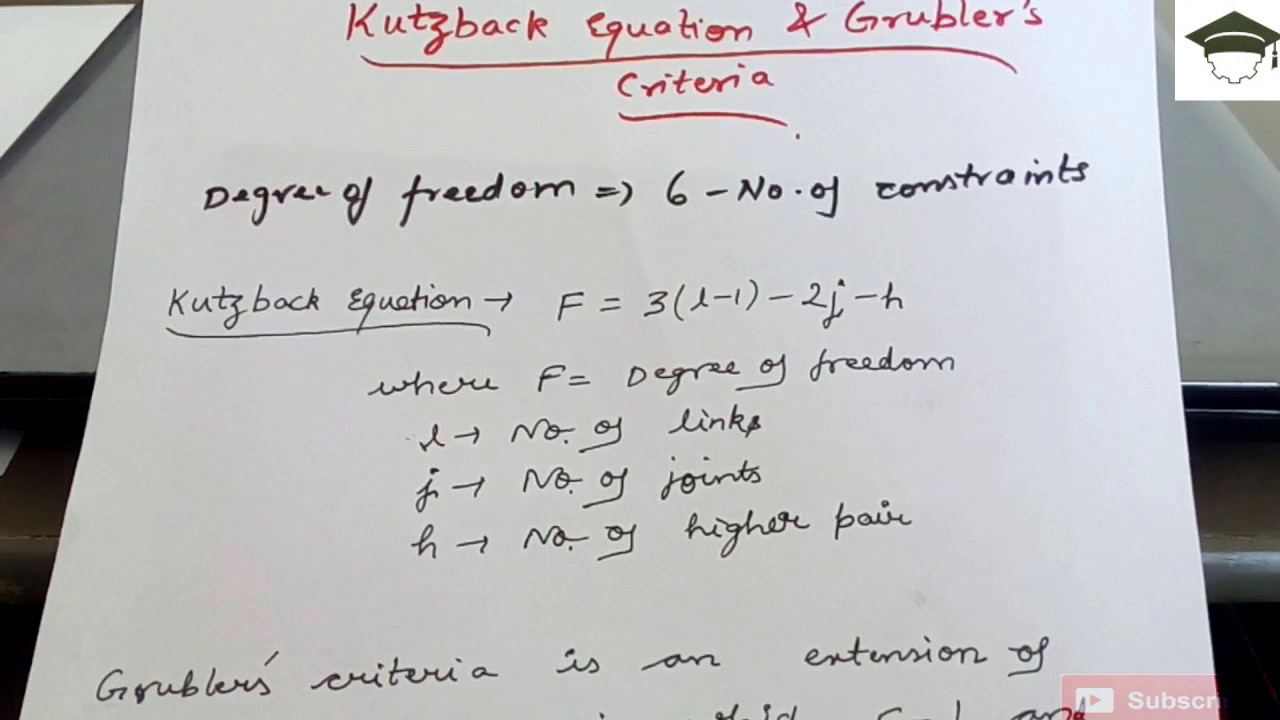
The equation for Grubler's criterion for plane mechanisms with constrained motion is given by Grubler's equation:
°f = 3(n-1) - 2j - h,
where °f is the degree of freedom, n is the number of links, j is the number of joints, and h is the number of higher pair constraints.
Introduction to Grubler's Criterion
Grubler's criterion is a fundamental concept in the field of mechanism design, which helps to determine the degree of freedom of a plane mechanism. The equation takes into account the number of links, joints, and higher pair constraints in the mechanism to calculate the degree of freedom. This is essential in designing mechanisms with constrained motion, where the movement of the links is restricted.
- The degree of freedom is a measure of the number of independent parameters that define the configuration of a mechanism.
- Links are the rigid bodies that make up the mechanism, and joints are the connections between these links.
- Higher pair constraints are the constraints imposed by the joints and links on the motion of the mechanism.
Importance of Grubler's Criterion in Mechanism Design
Grubler's criterion is crucial in mechanism design, as it helps to determine the feasibility of a proposed mechanism. By calculating the degree of freedom, designers can ensure that the mechanism will have the desired motion and constraints. This is particularly important in the design of plane mechanisms with constrained motion, where the degree of freedom must be carefully controlled.
- The degree of freedom affects the stability and accuracy of the mechanism.
- Grubler's equation provides a simple and effective way to calculate the degree of freedom.
- Designers can use Grubler's criterion to optimize the design of the mechanism and ensure that it meets the required performance criteria.
Application of Grubler's Criterion in Plane Mechanisms
Grubler's criterion has numerous applications in the design of plane mechanisms with constrained motion. It is used in the design of linkages, gears, and cam mechanisms, among others. By applying Grubler's equation, designers can ensure that the mechanism has the required degree of freedom and constraints to perform the desired motion.
- Linkages are a type of plane mechanism that use links and joints to transmit motion.
- Gears are used to transmit rotational motion between shafts.
- Cam mechanisms use a cam to transmit motion to a follower.
Limitations of Grubler's Criterion
While Grubler's criterion is a powerful tool in mechanism design, it has some limitations. It assumes that the links and joints are ideal, and that the mechanism is planar. In practice, mechanisms may have non-ideal components and non-planar motion, which can affect the degree of freedom.
- Non-ideal components can introduce clearance and friction, which can affect the motion of the mechanism.
- Non-planar motion can introduce additional degrees of freedom, which are not accounted for by Grubler's equation.
- Designers must consider these limitations when applying Grubler's criterion to real-world mechanisms.
Extensions of Grubler's Criterion
There have been several extensions of Grubler's criterion to accommodate non-ideal components and non-planar motion. These extensions include the use of kinematic pairs and screw theory to model the motion of mechanisms.
- Kinematic pairs are used to model the motion of joints and links in a mechanism.
- Screw theory is used to model the motion of mechanisms with non-planar motion.
- These extensions provide a more accurate and robust way to calculate the degree of freedom of a mechanism.
Frequently Asked Questions (FAQs)
What is Gruebler's Theorem and how does it apply to kinematics calculations?
Gruebler's Theorem is a fundamental concept in the field of kinematics, which is the study of the motion of objects without considering the forces that cause the motion. The theorem states that for a planar mechanism, the degree of freedom is determined by the number of links and joints. In a kinematics calculator, Gruebler's Theorem is used to calculate the degree of freedom of a mechanism, which is essential in determining the motion of the mechanism. By applying Gruebler's Theorem, engineers and designers can determine the feasibility of a mechanism and identify potential design flaws. The theorem is widely used in the design and analysis of mechanisms, such as gears, cam followers, and linkages. The accuracy of the calculations is crucial in ensuring the reliability and efficiency of the mechanism.
How does the Gruebler's Theorem Rule Kinematics Calculator work?
The Gruebler's Theorem Rule Kinematics Calculator is a software tool that uses algorithms to calculate the degree of freedom of a mechanism based on Gruebler's Theorem. The calculator takes into account the number of links and joints in the mechanism, as well as the types of joints and degrees of freedom of each joint. The calculator then uses mathematical models to simulate the motion of the mechanism and determine the degree of freedom. The calculator can also be used to analyze the kinematics of a mechanism, including the velocity and acceleration of each link. The calculator is user-friendly and allows users to input the parameters of the mechanism and visualize the results in a graphical interface. The calculator is a valuable tool for engineers and designers, as it enables them to design and optimize mechanisms with high accuracy and efficiency.
What are the benefits of using the Gruebler's Theorem Rule Kinematics Calculator?
The Gruebler's Theorem Rule Kinematics Calculator offers several benefits to engineers and designers. One of the main advantages is the ability to quickly and accurately calculate the degree of freedom of a mechanism, which can save time and resources. The calculator also enables users to analyze the kinematics of a mechanism, including the velocity and acceleration of each link, which can help to identify potential design flaws. Additionally, the calculator can be used to optimize the design of a mechanism, by iterating on different design parameters and evaluating the results. The calculator is also a valuable tool for education and research, as it can be used to teach students about kinematics and mechanism design, and to simulate complex mechanisms. The calculator is a powerful tool that can help to improve the design and performance of mechanisms.
What are the limitations of the Gruebler's Theorem Rule Kinematics Calculator?
The Gruebler's Theorem Rule Kinematics Calculator is a powerful tool, but it also has some limitations. One of the main limitations is that the calculator is based on simplifying assumptions, such as the assumption that the mechanism is planar and that the joints are ideal. In real-world applications, mechanisms can be complex and non-planar, and the joints can be non-ideal, which can affect the accuracy of the calculations. Additionally, the calculator is limited to kinematics calculations and does not take into account dynamics or statics. The calculator also requires input from the user, which can be time-consuming and error-prone. Furthermore, the calculator is a software tool and can be affected by numerical errors or bugs, which can affect the accuracy of the results. Despite these limitations, the calculator is still a valuable tool for engineers and designers, as it can help to improve the design and performance of mechanisms.
Deja una respuesta
Entradas Relacionadas